摄像头模组到底怎么选?5个真实痛点一次讲透
作者:admin
发布时间:2026-06-29 14:55:50
点击量:40
你可能遇到过这样的情况:方案做得很漂亮,算法调得很精细,可一到实际落地,画面就是发糊、偏色、噪点满天飞。反复排查软件、调参数、换镜头,问题依旧。
问题很可能不在最后那一公里,而在最开始的源头——摄像头模组没选对。
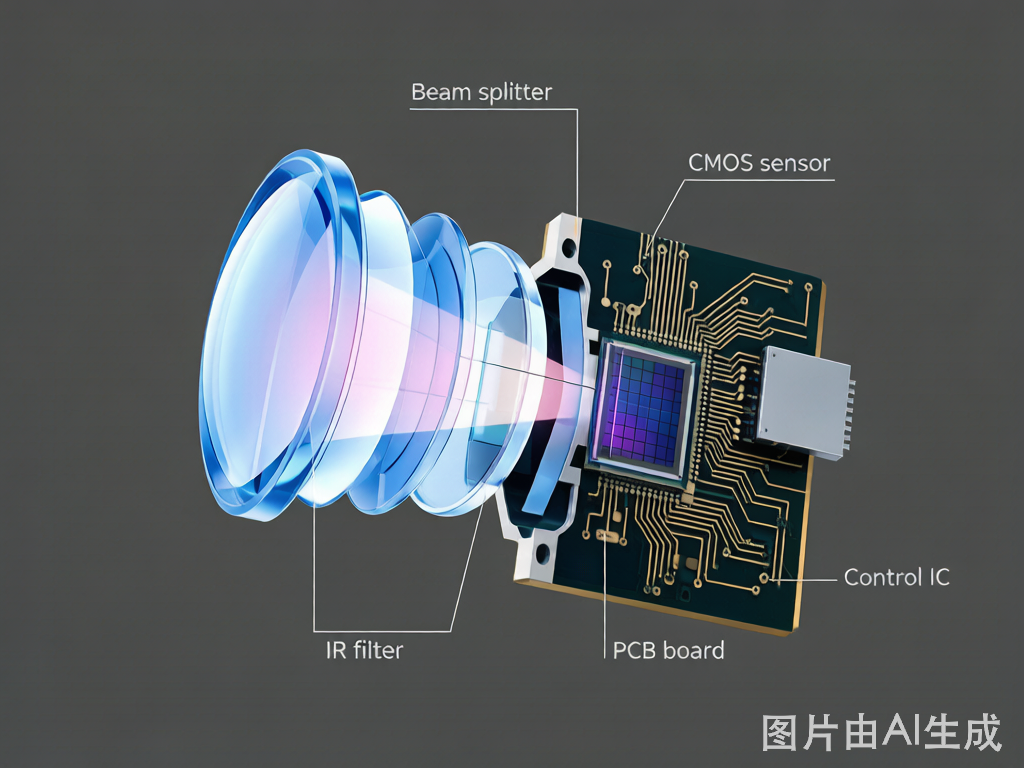
摄像头模组是整个视觉系统的"眼睛",它决定了画面质量的天花板。后面的 ISP、算法、AI 处理,都只能在这道天花板下面做文章。模组本身不行,再多后期补救也是徒劳。
可偏偏模组选型这件事,坑特别多。我们梳理了行业里最常见的 5 个痛点,逐一说清楚——为什么会踩坑,坑在哪,怎么绕过去。
痛点一:像素越高越清晰?这是最大的误区
"我们这个项目要 4K,必须上高像素模组。"——这句话听过无数次。
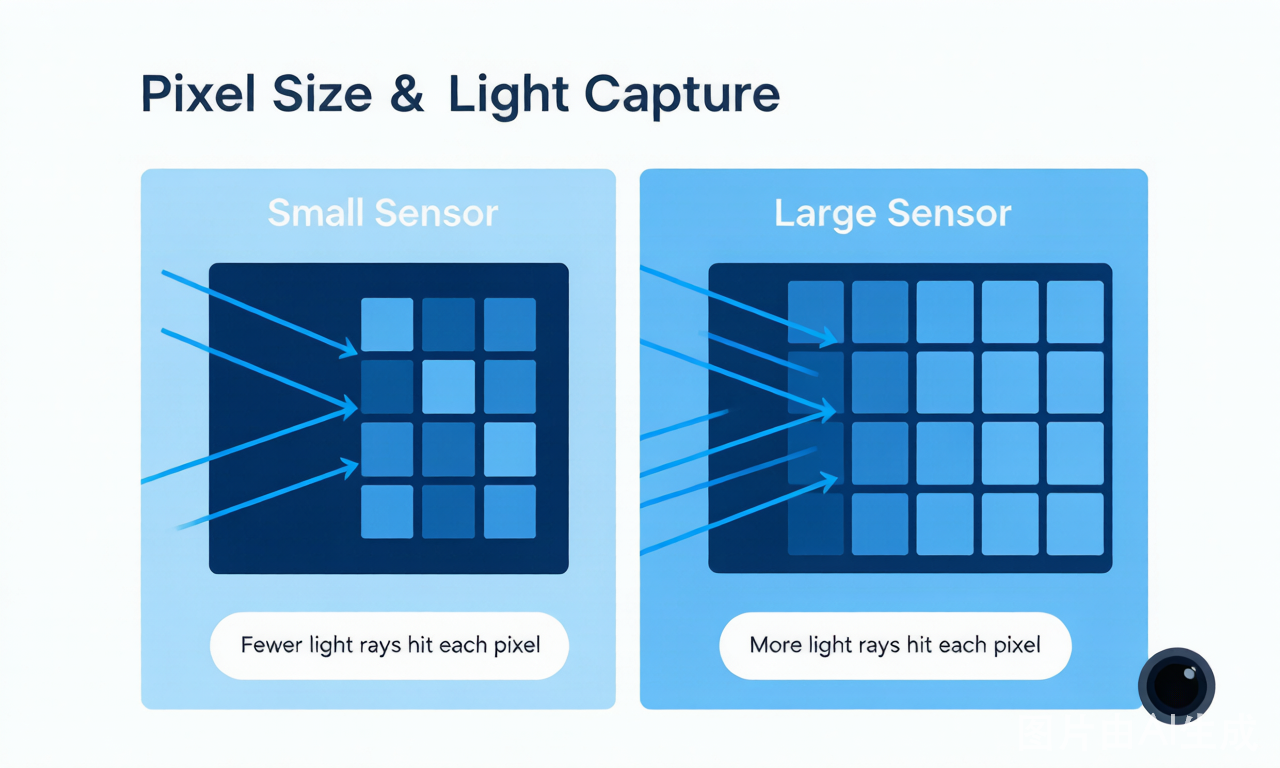
但像素高,不等于画面清晰。真正决定成像质量的,是单像素的感光面积,而不是总像素数。
同样大小的感光元件,像素从 800 万堆到 6400 万,单像素面积反而缩小了,每个像素能接收的光子更少,暗光下噪点更严重,动态范围也更窄。结果就是:参数表很漂亮,实际画面还不如隔壁 1200 万像素的模组。
怎么破:
- 不要只看总像素,重点看感光元件尺寸和单像素尺寸(单位 μm)
- 暗光场景优先选大底 + 大单像素,而不是堆像素
- 如果必须高像素,确认是否支持像素四合一(Tetracell)或九合一技术
记住一句话:像素决定分辨率上限,感光面积决定画质下限。
痛点二:白天好好的,一到晚上就"瞎"
这是车载、安防、门禁场景最常见的投诉。白天画面通透,一到晚上噪点爆炸、色彩失真、人脸糊成一团。
根子在光学设计和 sensor 的灵敏度上。很多模组为了压成本,用的是普通玻璃镜头,镀膜一般,夜间的红外波段透过率低;sensor 的灵敏度(量子效率 QE)不够,弱光下信噪比急剧恶化。
怎么破:
- 夜间场景必须关注 sensor 的星光级/黑光级指标
- 镜头选高透过率玻璃 + 多层镀膜,红外波段透过率不低于 90%
- 搭配 HDR sensor,解决夜间过曝和死黑问题
- 必要时用 RGB-IR sensor,白天彩色 + 夜间红外
痛点三:体积、散热、画质,三者怎么都要?
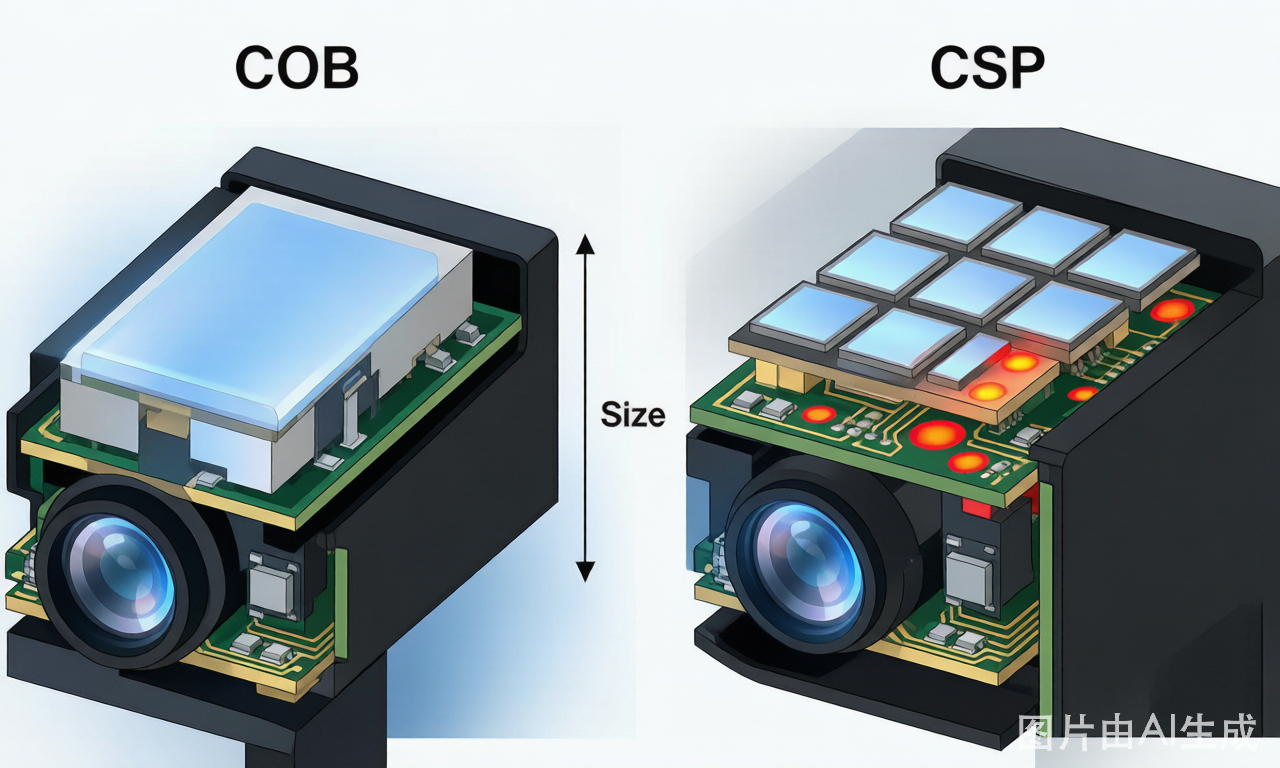
手机要薄,摄像头不能凸;车载要藏进车内,空间寸土寸金;工业检测要塞进设备腔体,散热条件恶劣。可画质又不能妥协——这是个典型的"既要又要还要"难题。
怎么破:
- 优先选COB 封装工艺,比传统 CSP 封装体积小 30%-40%
- 高温场景关注模组的热漂移控制——镜头支架用低热膨胀系数材料
- sensor 选低功耗工艺(如背照式 BSI),从源头减少发热
- 结构上预留导热路径,被动散热
- 实在散热扛不住,考虑分体设计
痛点四:成本压不下来,质量又不能降
摄像头模组的成本构成里,sensor 占 40%-50%,镜头占 20%-25%。降本空间主要在三个地方:
- sensor 选型别一味追一线品牌——二线品牌对应型号完全够用,价格便宜 20%-30%
- 镜头别过度设计——普通安防用 G+P 混合镜头就能满足,成本比全玻璃低一半
- 别在量产测试上省钱——AA 测试、影像质量全检看似增加成本,实则大幅降低返修率
痛点五:小批量样件没问题,量产就翻车

这是最隐蔽、也最致命的坑。打样阶段供应商给的是精挑细选的"黄金样件",一到量产一致性就崩了。
怎么破:
- 选型阶段不只看参数,更要看供应商的量产履历
- 签合同时明确 AQL 和关键指标公差带
- 首批量产必须做SPC 数据分析,看 Cpk 值是否≥1.33
- 建立来料抽检机制,重点检测焦距一致性、白平衡一致性、坏点率
- 关键项目建议双供应商策略
写在最后
回头看这 5 个痛点,有个共同点:都不是单纯靠堆参数能解决的。真正决定项目成败的,是感光面积、光学设计、封装工艺、供应商能力这些参数表上看不见的东西。
金视康科技深耕摄像头模组领域,覆盖消费电子、车载、安防、工业检测等多场景应用,从选型咨询到量产交付提供全流程支持。有需求,随时聊。





 13423810014
13423810014  0755-29433686
0755-29433686  daming@cameras-module.com
daming@cameras-module.com  深圳市宝安区石岩镇园岭村志泫翰工业园H栋2楼
深圳市宝安区石岩镇园岭村志泫翰工业园H栋2楼